
【书籍阅读】《统计学习方法》
一. 统计学习方法概论:
首先,要明确计算机科学中存在三个维度:系统,计算,与信息。统计学习方法(机器学习)主要属于信息这一维度,并在其中扮演者核心角色。
1. 监督学习概念:
监督学习,Supervised learning,指在已经做好标注的训练集上学习,为了叙述方便,定义以下基本概念:
- **输入空间(X),输出空间(Y):**输入所有可能取值,输出所有可能取值;
- **特征空间:**输入一般由特征向量表示,所有特征向量存在的空间称为特征空间,输入空间与特征空间并不完全等价,有时需要映射;
- 上标 x^i^ :表示一个输入的第 i 个特征;
- **下标 x
j:**表示第 j 个输入。- **回归问题:**输入输出都为连续型变量;
- **分类问题:**输出变量为有限个离散型变量;
- **标注问题:**输入与输出变量都为变量序列。
- **假设空间:**所有可能的模型的集合,也就是学习的范围。
使用训练集学习—->对未知数据进行预测
2. 统计学习三要素:
统计学习三要素为:模型,策略,算法;
模型是决定学习的预测函数的类型;
策略是判定什么样的模型是好的,用于度量当前的模型好坏;
算法是训练过程中的具体做法,例如如何回归,如何计算,如何调整等。
3. 模型的衡量方法:
损失函数与风险函数:
损失函数,Loss Function,用于模型一次预测的错误程度,例如:
损失函数的数值越小,模型就越好。如果计算损失函数的期望,得到的就是风险函数,Risk Function:

可以看出,损失函数用于某次预测的估计,风险函数用于总体平均估计。我们当然希望训练出的模型的风险函数越小越好。
但是,观察上式,理想化的概率分布P(x,y)是未知的,我们进行学习就是要通过模型来模拟它,故这个式子理论存在,实际不能计算,不能用作评估模型的直接方法。
经验风险与结构风险:
为了解决上述问题,我们引入经验风险:

可以看到,经验风险将每个样本视作等概率出现,是模型对于训练集的平均损失,那么其与风险函数的误差在哪?
根据大数定律,当训练集足够大时,二者是近似相等的。但实际情况下,很多时候训练样本数目有限,甚至很小,故用经验风险效估计风险函数并不理想,故需要进行修正,这就是监督学习中的**两个基本策略:**经验风险最小化和结构风险最小化。
如果训练样本容量较大,使用经验风险最小化没什么问题。
当样本容量很小时,仅仅使用经验风险最小化容易导致过拟合,故这里使用**结构风险(就是正则化)**最小化方法,对模型复杂度进行惩罚,后续介绍。
训练误差与测试误差:
训练误差本质上不重要,它可以反应一个问题是不是容易学习,但要衡量模型的预测能力,主要是看测试误差。
正则化与交叉验证:
正则化是在经验风险项后再增加一个正则化项(Regularizer),其与模型的复杂度成正相关,一般使用模型参数向量的范数:

交叉验证的基本思想是重复使用数据:
简单交叉验证:
将训练集随机分为两部分,一部分训练,一部分测试,然后在各种条件下训练出不同的模型,用测试集进行横向对比,选出最好的。
- S折交叉验证:
S-fold cross validation,随机地将已给数据切分为S个互不相交的大小相同的子集,选取S-1个用于训练,剩下一个用于测试。
这样总共测试集有S种选法,将这S种全部试一遍,评选S次测评中平均误差最小的模型。
- 留一交叉验证:
令S=N(训练集大小)即可,这种方法往往是在数据集特别缺乏的情况下使用。
泛化误差与泛化上界:
泛化能力指模型对位置数据的预测能力,就是模型的好坏。如何量化这个能力?
根据定义,其就是模型在测试集上的测试表现:

同时可以用以下式子衡量泛化误差的上界:
生成模型与判别模型:
监督学习方法又可以分为两种方法:生成方法(Generatice Approach)和判别方法(Discriminative Approach)。
如果以概率论的角度来看待,模型的作用是根据P(x)来求P(y | x),故下面有两种方法求
P(y | x),直接模拟P(y | x)和通过求 $P(\frac{y}{x}) = \frac{P(x,y)}{P(x)}$ 来求P(y | x)。
前者就是判别模型,后者是生成模型。
生成模型可以还原出联合概率分布P(x , y),学习收敛速度更快,可以适应存在隐含变量的情况;
判别模型直接学习条件概率,直接面对预测,准确率更高,并且简化了学习问题。
二. 感知机
感知机,perceptron,是二分类的线性分类模型,输入为特征向量,输出为类别,取1和-1两种。
感知机属于判别模型。
对于一个给定数据集,T = {(x1,y1)……(xn,yn)},如果存在某个超平面S,w·x + b = 0(这里w是超平面的法向量,b是截距),使得所有 yi = 1 的实例i,有 w·xi + b > 0,yi = -1则相反,则称数据集T为线性可分数据集(Linealy separable data set),否则,称数据集T为线性不可分数据集。
2.1 感知机损失函数:
感知机的目的就是对于一个线性可分的数据集,通过找出w和b,来确定一个超平面用于分类。
这里,我们选取某错误分类点到超平面S的总距离来当做损失函数,某一点到超平面S的距离如下:
‖w‖是w的L2范数。
故,某个误分类点到超平面S的距离是:
将所有误分类点求和,忽略L2范数,即可得到感知机的损失函数(M为误分类点集合):
对于一个特定样本点的损失函数,在误分类时是参数w,b的线性函数,在正确分类时是0,故给定训练数据集T,损失函数L是w,b的连续可导函数。
2.2 训练过程:
感知机训练采用随机梯度下降的方法:
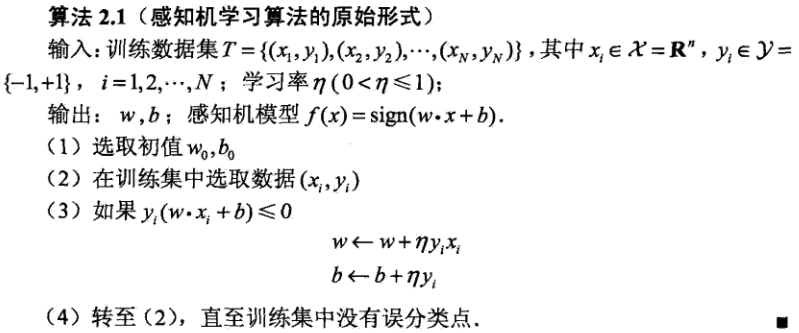
当找到一个误分类点时,不断梯度下降直至该点被正确分类为止。
数学证明其收敛性:
具体见书本,这里略过。
2.3 感知机的对偶形式:

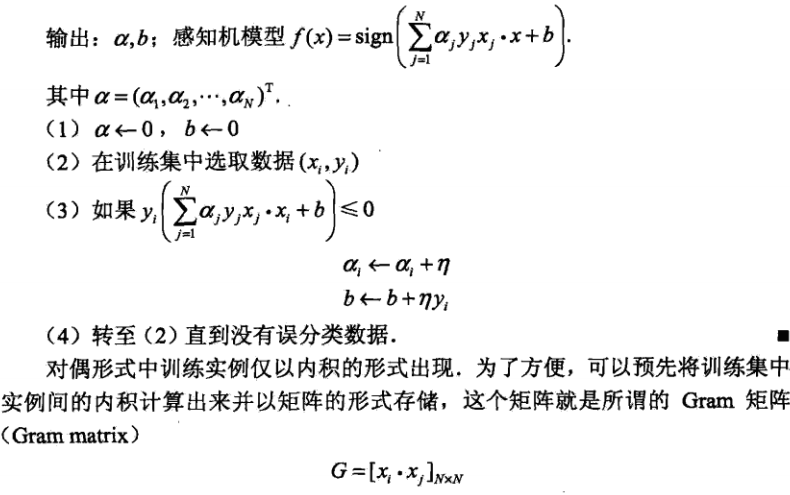
由图可以看到,对于每个测试集中的xi,都有一个与之对应的αi,对偶形式中就是调整其对应的α。
关于gram矩阵的作用,如果手算一遍简单的训练过程,就可以得到答案。
三. k近邻法
k近邻法是一种基本的分类与回归方法,这里只讨论分类方法。
其输入为特征向量,输出为实例的类别,可以取多类。
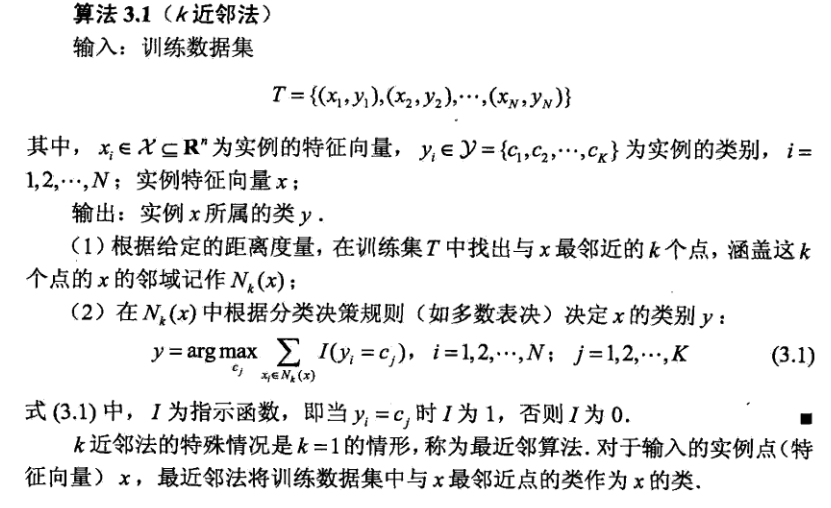
3.1 算法描述:
给定一个训练集,对于新的数据实例,在训练数据集中找到与其最邻近的k个实例,这k个实例多数属于某个类,就把该输入实例分为这个类。
k近邻法没有显式的学习过程。可以理解为,k近邻算法将特征空间划分为了一些子空间,每个点所属的空间是确定的。
- 如何度量两个特征之间的距离?
k邻近模型的特征空间一般是n维实空间R^n^,使用欧氏距离或者Lp距离(Lp distance),Minkowski距离(Minkowski distance);
Lp距离:
欧氏距离:

曼哈顿距离:

无穷距离:

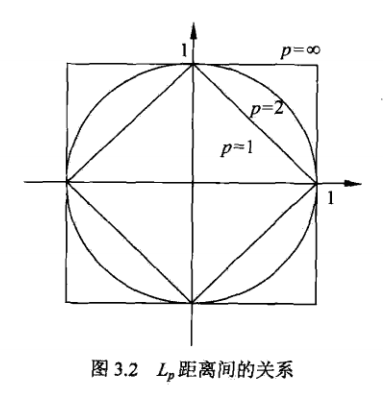
由下图可以看出,p取值不同时到原点距离为1的图形是不同的:
如何选择k的值?
k值越小,模型学习时的近似误差越小,估计误差越大,模型会越复杂,抗干扰性越小(例如,最邻近的点是噪声),模型会非常敏感,容易过拟合;
k值越大,估计误差会很小,近似误差会很大,整体模型变得简单。
k一般的取值并不大,使用交叉验证的方法来选取最佳的k值。
如何决策?
在得到k个最相似的实例后,采用何种规则判断测试样本属于哪一类呢?
k邻近算法使用多数表决的方法:
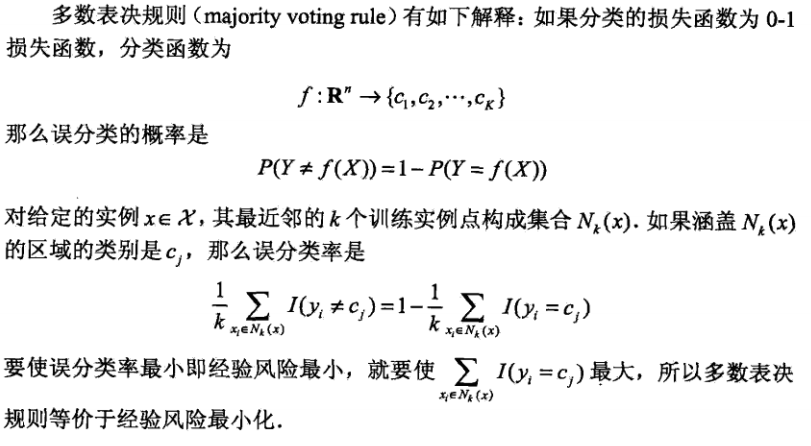
ps: ci表示某种决策规则下一组测试用例的表决结果。经由以上推导可以得出,多数表决规则是合理的。