
Connect X
Time: 2022.11.14
Author: Shaw
一、任务简介:
- **任务:**强化学习任务,类似五子棋的规则(但每一步只能下某一列的最底端的空位),每人一步,先于对手横竖或斜角连成4个即可获胜。
评估方法:
每个提交给Kaggle的结果(一个py文件,包含了agent如何下棋的规则)在跟自己下一次棋,证明其工作正常后,会被赋予一个skill等级。
相近skill等级的提交结果之间会进行持续不断下棋PK。
每次PK结束后就会更新双方的等级,赢加输减。
二、环境准备
安装kaggle相关的强化学习环境:
pip install kaggle-environments创建Connect X环境:
from kaggle_environments import evaluate, make, utils
env = make("connectx",debug=True) #创建connectx环境
env.render() #以图形化的形式显示当前环境创建Submission提交函数:
import inspect
import os
def write_agent_to_file(function, file):
with open(file, "a" if os.path.exists(file) else "w") as f:
f.write(inspect.getsource(function))
print(function, "written to", file)
write_agent_to_file(my_agent, "submission.py")三、Q-learning
对于简单的下棋问题,这里选择Q-learning算法进行学习。
创建connectX类:
class ConnectX(gym.Env):
def __init__(self, switch_prob=0.5):
self.env = make('connectx', debug=True)
self.pair = [None, 'negamax']
self.trainer = self.env.train(self.pair)
self.switch_prob = switch_prob
# Define required gym fields (examples):
config = self.env.configuration
self.action_space = gym.spaces.Discrete(config.columns)
self.observation_space = gym.spaces.Discrete(config.columns * config.rows)
def switch_trainer(self):
self.pair = self.pair[::-1]
self.trainer = self.env.train(self.pair)
def step(self, action):
return self.trainer.step(action)
def reset(self): # 有switch_prob的几率更换先手顺序
if random.uniform(0, 1) < self.switch_prob:
self.switch_trainer()
return self.trainer.reset()
def render(self, **kwargs):
return self.env.render(**kwargs)创建Q表,由于棋盘状态较多,这里使用动态Q表(shape = (n,7)):
class QTable:
def __init__(self, action_space):
self.table = dict()
self.action_space = action_space
def add_item(self, state_key):
self.table[state_key] = list(np.zeros(self.action_space.n))
def __call__(self, state):
board = state['board'][:] # 复制一份
board.append(state.mark) # 加入mark标志着先手还是后手
state_key = np.array(board).astype(str)
state_key = hex(int(''.join(state_key), 3))[2:]# 转为16进制编码,去掉前缀
if state_key not in self.table.keys():
self.add_item(state_key)
return self.table[state_key]定义相关超参数:
alpha = 0.1 # 学习率
gamma = 0.6 # discount factor γ
epsilon = 0.99 # ε-greedy策略的ε
min_epsilon = 0.1 # 最小ε
episodes = 10000 # 采样轮数
alpha_decay_step = 1000
alpha_decay_rate = 0.9 # α衰减率
epsilon_decay_rate = 0.9999 # ε衰减率定义训练过程:
q_table = QTable(env.action_space)
all_epochs = []
all_total_rewards = []
all_avg_rewards = [] # Last 100 steps
all_qtable_rows = []
all_epsilons = []
for i in tqdm(range(episodes)):
state = env.reset() # 清空棋盘
epochs,total_rewards = 0, 0
epsilon = max(min_epsilon,epsilon*epsilon_decay_rate) # ε每轮衰减
done = False
while not done : # 开始一轮采样
# 某列不能下的情况 == 此列的第一个位置有棋子 == (state.board[c] == 0)
space_list = [c for c in range(env.action_space.n) if state['board'][c] == 0]
if random.uniform(0,1) <= epsilon :# ε-greedy-->选择随机策略
action = choice(space_list)
else : # ε-greedy-->选择贪心策略
row = np.array(q_table(state)[:])
row[[c for c in range(env.action_space.n)
if state['board'][c] != 0]] = -1
action = int(np.argmax(row))
next_state,reward,done,info = env.step(action)
if done:
if reward == 1: # Won
reward = 20
elif reward == 0: # Lost
reward = -20
else:
reward = 1
else:
reward = -0.01
old_value = q_table(state)[action]
next_max = np.max(q_table(next_state))
# Q-Learning 更新
new_value = (1 - alpha) * old_value + alpha * (reward + gamma * next_max)
q_table(state)[action] = new_value
state = next_state
epochs += 1
total_rewards += reward
all_epochs.append(epochs)
all_total_rewards.append(total_rewards)
avg_rewards = np.mean(all_total_rewards[max(0, i-100):(i+1)])
all_avg_rewards.append(avg_rewards)
all_qtable_rows.append(len(q_table.table))
all_epsilons.append(epsilon)
if (i+1) % alpha_decay_step == 0:
alpha *= alpha_decay_rate
根据Q表生成Agent:
my_agent = '''def my_agent(observation, configuration):
from random import choice
q_table = ''' \
+ str(dict_q_table).replace(' ', '') \
+ '''
board = observation.board[:]
board.append(observation.mark)
state_key = list(map(str, board))
state_key = hex(int(''.join(state_key), 3))[2:]
if state_key not in q_table.keys():
return choice([c for c in range(configuration.columns) if observation.board[c] == 0])
action = q_table[state_key]
if observation.board[action] != 0:
return choice([c for c in range(configuration.columns) if observation.board[c] == 0])
return action
'''
with open('submission.py', 'w') as f:
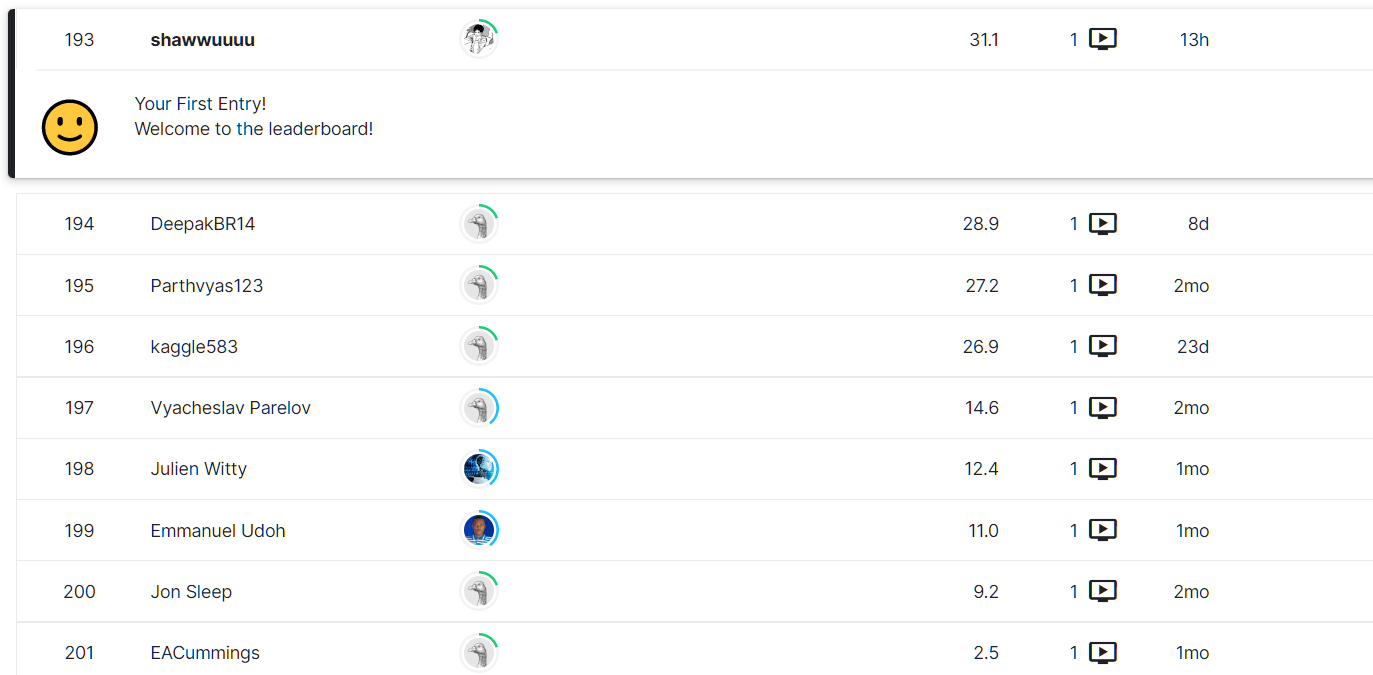
f.write(my_agent)上交到Kaggle后经过一晚上的博弈,分数很低,直接倒数:
尝试评估其效果:
from submission import my_agent
def mean_reward(rewards):
win = sum(1 if r[0]>0 else 0 for r in rewards)
loss = sum(1 if r[1]>0 else 0 for r in rewards)
draw = sum(1 if r[0] == r[1] else 0 for r in rewards)
return '{0} episodes- won: {1} | loss: {2} | draw: {3} | winning rate: {4}%'.format(
len(rewards),
win,
loss,
draw,
(win / len(rewards))*100
)
# Run multiple episodes to estimate agent's performance.
print("My Agent vs Random Agent:", mean_reward(
evaluate("connectx", [my_agent, "random"], num_episodes=100)))
print("My Agent vs Negamax Agent:", mean_reward(
evaluate("connectx", [my_agent, "negamax"], num_episodes=100)))

四、DQN
在尝试了简单的强化学习算法后,这里将深度学习与强化学习结合起来,用DQN进行训练:
DQN使用了神经网络来代替Q表,使用函数替代表格,以此解决Q表过大的问题:
class ConnectX(gym.Env):
def __init__(self, switch_prob=0.5):
self.env = make('connectx', debug=False)
self.pair = [None, 'random']
self.trainer = self.env.train(self.pair)
self.switch_prob = switch_prob
# Define required gym fields (examples):
config = self.env.configuration
self.action_space = gym.spaces.Discrete(config.columns)
self.observation_space = gym.spaces.Discrete(config.columns * config.rows)
def switch_trainer(self):
self.pair = self.pair[::-1]
self.trainer = self.env.train(self.pair)
def step(self, action):
return self.trainer.step(action)
def reset(self):
if np.random.random() < self.switch_prob:
self.switch_trainer()
return self.trainer.reset()
def render(self, **kwargs):
return self.env.render(**kwargs)
class DeepModel(torch.nn.Module):
def __init__(self,num_states,hidden_units,num_actions):
super(DeepModel,self).__init__()
self.hidden_layers = nn.ModuleList([])
for i in range(len(hidden_units)):
if i == 0:
self.hidden_layers.append(nn.Linear(num_states,hidden_units[i]))
else :
self.hidden_layers.append(nn.Linear(hidden_units[i-1],hidden_units[i]))
self.output_layers = nn.Linear(hidden_units[-1],num_actions)
def forward(self,x):
for layer in self.hidden_layers:
x = torch.sigmoid(layer(x))
x = self.output_layers(x)
return xclass DQN:
def __init__(self,num_states,num_actions,hidden_units,gamma,max_experiences,min_experiences,batch_size,lr):
self.num_actions = num_actions
self.batch_size = batch_size
self.gamma = gamma
self.model = DeepModel(num_states,hidden_units,num_actions)
self.optimizer = optim.Adam(self.model.parameters(), lr = lr)
self.criterion = nn.MSELoss()
self.experience = {'s':[],
'a':[],
'r':[],
's2':[],
'done':[]
}
self.max_experiences = max_experiences
self.min_experiences = min_experiences
def preprocess(self, state):
result = state.board[:]
result.append(state.mark)
return result
def predict(self,inputs):
return self.model(torch.from_numpy(inputs).float())
def train(self,TargetNet):
if len(self.experience['s']) < self.min_experiences:
return 0
ids = np.random.randint(low=0, high=len(self.experience['s']), size=self.batch_size)
states = np.asarray([self.preprocess(self.experience['s'][i]) for i in ids])
actions = np.asarray([self.experience['a'][i] for i in ids])
rewards = np.asarray([self.experience['r'][i] for i in ids])
states_next = np.asarray([self.preprocess(self.experience['s2'][i]) for i in ids])
dones = np.asarray([self.experience['done'][i] for i in ids])
value_next = np.max(TargetNet.predict(states_next).detach().numpy(), axis=1)
actual_values = np.where(dones, rewards, rewards+self.gamma*value_next)
actions = np.expand_dims(actions, axis=1)
actions_one_hot = torch.FloatTensor(self.batch_size, self.num_actions).zero_()
actions_one_hot = actions_one_hot.scatter_(1, torch.LongTensor(actions), 1)
selected_action_values = torch.sum(self.predict(states) * actions_one_hot, dim=1)
actual_values = torch.FloatTensor(actual_values)
self.optimizer.zero_grad()
loss = self.criterion(selected_action_values, actual_values)
loss.backward()
self.optimizer.step()
def get_action(self,state,epsilon):
if np.random.random() < epsilon:
return int(np.random.choice([c for c in range(self.num_actions) if state.board[c] == 0]))
else :
prediction = self.predict(np.atleast_2d(self.preprocess(state)))[0].detach().numpy()
for i in range(self.num_actions):
if state.board[i] != 0:
prediction[i] = -1e7
return int(np.argmax(prediction))
def add_experience(self, exp):
if len(self.experience['s']) >= self.max_experiences:
for key in self.experience.keys():
self.experience[key].pop(0)
for key, value in exp.items():
self.experience[key].append(value)
def copy_weights(self, TrainNet):
self.model.load_state_dict(TrainNet.state_dict())
def save_weights(self, path):
torch.save(self.model.state_dict(), path)
def load_weights(self, path):
self.model.load_state_dict(torch.load(path))训练时,将采样的s,r,a,s’存储下来,等到积累到一定数量后再以batch的形式输入神经网路(这里是全连接层),训练,测试。
通过这种方式,可以极大的增加训练的轮数,这里尝试十万轮(训练时间四小时):

五、RollOut
RollOut算法是典型的决策时规划算法,其思路是:
- 对当前状态S的所有可能取值<s,a’>,模拟计算若干次,取得每个<s,a’>的平均Reward;
- 选取Reward最大的动作A;
模拟计算时使用的策略称之为rollout策略,这里直接采用随机策略。
使用如下类进行蒙特卡洛采样:
class MonteCarlo:
def __init__(self, env, gamma, episodes):
'''
env是当前需要进行模拟采样的状态
gamma用于计算Reward
episodes是每个(s,a)的采样次数
'''
self.state = deepcopy(env)
self.all_rewards = [0, 0, 0, 0, 0, 0, 0]
self.gamma = gamma
self.episodes = episodes
def rollout(self, env):
# 对当前状态进行rollout采样
mean_reward = 0
ini_state = env.env.state[0]['observation']
for i in range(self.episodes):
r = 0
gamma = 1
env.set_state(ini_state)
state = deepcopy(ini_state)
done = False
while not done:
space_list = [c for c in range(7) if state['board'][c] == 0]
action = choice(space_list)
next_state, reward, done, info = env.step(action)
if done:
if reward == 1:
r += 20*gamma
elif reward == 0:
r -= 20*gamma
else:
r += 1*gamma
mean_reward += r
else:
r -= 0.05*gamma
gamma *= self.gamma
state = next_state
return mean_reward/self.episodes因为MC采样需要在采样后将环境状态恢复,故在原本的ConnectX类中添加设置状态方法,并删除swicth_trainer:
class ConnectX(gym.Env):
def __init__(self, switch_prob=0.5):
self.env = make('connectx', debug=True)
self.pair = [None, 'random']
self.trainer = self.env.train(self.pair)
self.switch_prob = switch_prob
config = self.env.configuration
self.action_space = gym.spaces.Discrete(config.columns)
self.observation_space = gym.spaces.Discrete(
config.columns * config.rows)
def step(self, action):
return self.trainer.step(action)
def set_state(self, init_state):
self.env.reset()
self.env.state[0]['observation'] = deepcopy(init_state)
def reset(self):
return self.trainer.reset()
def render(self, **kwargs):
return self.env.render(**kwargs)调试时设置play函数:
def play(num,env,gamma,episodes):
result = {'win':0,'loss':0,'draw':0}
for i in range(num):
#print('[GAME{}]:'.format(i))
done = False
state = env.reset()
while not done:
ini_state = env.env.state[0]['observation']
space_list = [c for c in range(7) if ini_state['board'][c] == 0]
R = []
for action in space_list: # rollout模拟采样
env.set_state(ini_state)
next_state, reward, done, info = env.step(action)
mc = MonteCarlo(env, gamma, episodes)
reward = reward + gamma*mc.rollout(env)
R.append(reward)
Action = int(np.argmax(R)) # 根据采样结果选择动作
env.set_state(ini_state)
next_state, reward, done, info = env.step(Action)
#print('R = ', R)
#print('Action = ', Action)
#print(env.render(mode="ansi"))
if done:
if reward == 1: # Won
result['win'] += 1
#print('you win!')
elif reward == 0: # Lost
result['loss'] += 1
#print('you loss!')
else:
result['draw'] += 1
#print('draw!')
print('My Agent vs Random Agent:', '{0} episodes- won: {1} | loss: {2} | draw: {3} | winning rate: {4}%'.format(
num,
result['win'],
result['loss'],
result['draw'],
(result['win'] / num)*100
))
六、问题总结
1. 训练时间过长
以Q-Learning为例,一个10000个episodes的训练要耗时2小时+,对于一个简单的四子棋过于耗时。
尝试:
- 尝试在python文件中而不是jupter中训练:训练总时间减少了约2/5,有一定效果;
- 使用DQN时训练速度明显大于Q-leraning(训练十万轮耗时3小时40分钟),猜想可能是神经网络可以使用GPU加速,‘查表’速度更快;
2. Q-Learning训练效果不佳
在经过10000个episode训练后,Q-Learning的表现如下:
通过如下的代码,你可以跟自己的agent下一局,可以发现,经过一万轮训练后的Agent棋力很一般,新手人类也能轻松胜利:
while not done:
sys.stdout.flush()
print(env.render(mode="ansi"))
action = int(input('Input your action:(0-6)'))
next_state, reward, done, info = env.step(action)
if done:
if reward == 1: # Won
print('you win!')
elif reward == 0: # Lost
print('you loss!')
else:
print('draw!')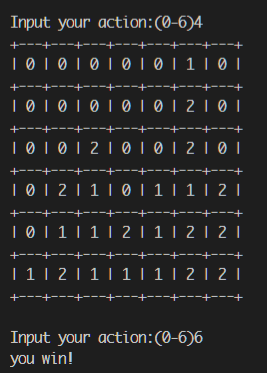
观察训练时平均Reward、Q表长度和ε的变化:
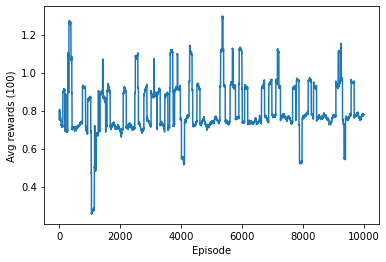
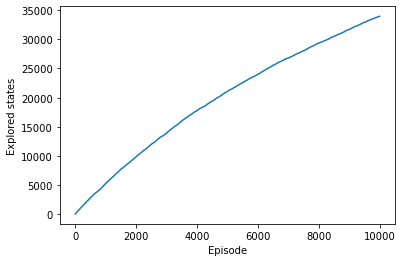
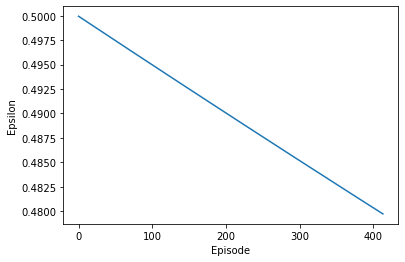
可以发现,在10000轮episode的训练中,平均奖励始终在围绕0.8上下波动,Q表长度一直在平稳增加,这说明直到训练结束Agent仍有大量未见过的state进入Q表,模型训练轮数不足。
实际上 Connect 4有四百万兆不同的状态,Q-learning显然在有限的时间空间下是取得不了什么有效学习的。
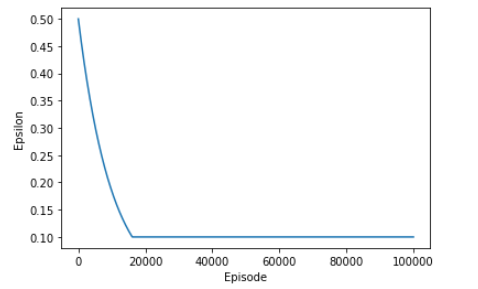
3. DQN的不足
即使使用DQN进行了十万轮的训练,耗时近4小时,DQN的结果仍不理想:
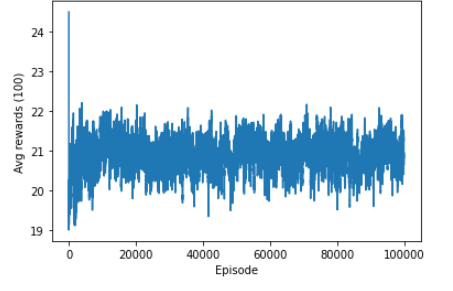
其实不难理解,对于四百万兆个state的棋盘,十万轮也不过是$$1/10^{13}$$,仍过于渺小。
并且,Q-learning以及DQN都是background planning,其算法倾向于将所有可能的状态的最佳策略都计算出来。实际上,在下棋的时候几乎绝大多数状态都不会出现第二次,但相似的棋谱格局却会经常出现。
显然,相较于background planning,***decision-time planning(决策时规划)***算法是个更合适的算法。
decision-time planning在遇到每个新的状态St后再开始一个完整的规划过程,其为每个当前状态选择一个动作At,到下一个状态St+1就选择一个动作At+1,以此类推。基于当前状态所生成的values和policy会在做完动作选择决策后被丢弃,在很多应用场景中这么做并不算一个很大的损失,因为有非常多的状态存在,且不太可能在短时间内回到同一个状态,故重复计算导致的资源浪费会很少。
4. 随机Rollout
这里尝试使用简单的RollOut算法后发现,即使在rollout算法中使用最简单的随机rollout策略,并且每轮模拟仅仅采样1次,所取得的的结果就比训练了4个小时的DQN好很多。
在模拟采样轮数为1(对每个<s,a>键值对只采样1次)、gamma为1的条件下,与Random和Negmax分别下100局的胜率:
| 模型 | VS Random | VS Negmax |
|---|---|---|
| Q-Learning(一万轮) | 61% | 3% |
| DQN(十万轮) | 70% | 6% |
| 随机Rollout | 94% | 95%平局 |
但Rollout算法的问题也很明显,其应用的过程就是‘训练’的过程,每次需要等模拟采样完成后再选择,故其反应时间会比DQN长很多。
| 时间 | DQN | 随机Rollout |
|---|---|---|
| 训练所需时间 | 4h | 0 |
| 下100局所需时间 | 1m | 40m |
但即使这样,我们也能看出,决策时规划比后台规划算法更适合棋类场景,由于棋类几乎无限的状态数量,决策时规划虽然反应更慢,但结果也更为合理有效。
5. 展望
本次的小比赛从最简单的Q-Learning算法入手,到引入了神经网络的DQN,最后从后台规划引入到决策时规划,并实现了一个简单的Rollout算法。
首先,Q-learning以及DQN这类后台规划算法无法有效处理状态过多的环境。Q-learning在时间以及空间上都存在溢出问题,DQN虽然引入了深度神经网络来替代Q表,解决了空间不足的问题,但由于其训练速度没有质的改变,训练时间仍不可估量的长。
**决策时规划面对状态过多的问题有明显提升。**即使在rollout算法中使用最简单的随机rollout策略,并且每轮模拟仅仅采样1次,所取得的的结果就比训练了4个小时的DQN好很多。
除了使用简单的随机Rollout算法,这里可以替换rollout策略来进一步提升结果,减少rollout的反应时间。以及,可以使用MCTS,蒙特卡洛树搜索的方法再进一步提升结果(kaggle中已有Notebook,且分数不错),这里篇幅以及时间有限,仅做展望。